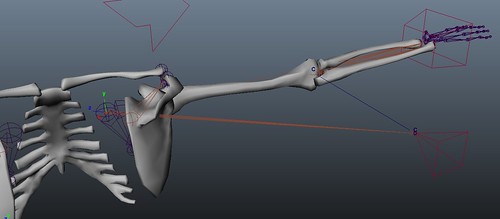
Rigging up the rest of the arm as usual with an ik.
Also i added another ik for the clavicle so that the actual pole vector also rotates the scapula. If you think about it, if you have your arm bent and rotate it as if your aiming with your elbow (much like moving a pole vector in maya) your shoulder is the part that's actually rotating and your clavicle rotates ever so slightly.
So for this reason ive removed the rotate x coming from the shoulder controls and instead joined the rotate x to a different ik section.
This new IK starts from the same point as the main driver joint and ends on the actual pole vector, the ik is then point constrained to the pole vector control. This way, when i move the pole vector the end joint is rotated by the ik giving me a rotation value from moving the pole vector control. this rotation is then fed into that twist of the main driver. This means the rotate Y and Z are controlled by the shoulder control and the X (or twist) is controlled by the pole vector.
The main reason for creating an extra ik and not just having the twist of the arm rotate the driver joints twist is because in doing so you cause a loop, the driver joint is dictating where the arm should be and the arm twist dictated where the driver should twist which causes bad jittering and flipping as maya is battling with a loop. Creating the extra ik section means the rotation is coming from a section that isnt dictated by the main driver joint so no loop :D
Also i found by placing the rig in extreme poses that the rotation can get a little too strong and cause the scapula to extend too far, so to avoid this i limited the driver joints rotate x to -12 to 12 so there's just some subtle movements.
Thursday, 22 December 2011
Masters - WIP - 20
Subscribe to:
Post Comments (Atom)
No comments:
Post a Comment