
Not much has changed apart from testing with global illumination. In previous shots ive been using final gather but i found that using global illumination can give better results and a shorter render time. In this test render the GI only takes about 40 seconds to give a great result, then with final gather and anti-aliasing on top takes a bit more but helps blend out the scene.
Saturday 31 July 2010
Friday 30 July 2010
What am i - WIP - 25

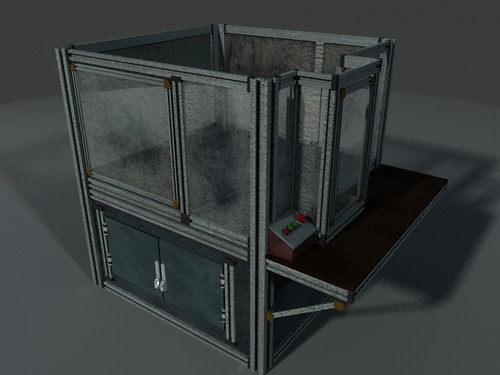
Adding the diffuse, bump and specular map to the walls form mudbox. Ive started to mess about with the lighting as I've not had much experience. For the lights i have 2 volume lights as cylinders to match the florescent lights, area light facing down to give out most of the light and shadows and another area light pointing upwards to give the ceiling more illumination. There are still a few dark spots that will need more attention but it helps to use several lights instead of using one light and trying to make it do everything :D.
What am i - WIP - 24
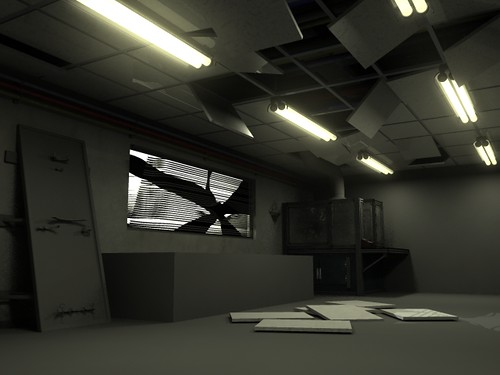
Light, cameras, Action!!! Well ive sort of got the light part started. Adding a few more props and test rendering the light placements. I enjoy seeing test renders because when working on something its easy to get lost and not see what its going to end up like, so a few test now and again help me get a feeling of what the final might look like :)
Thursday 29 July 2010
What am i - WIP - 23
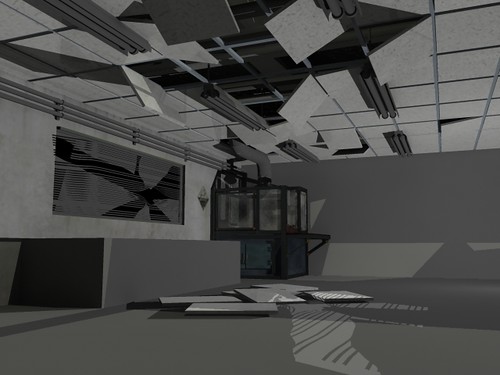
Today i started on the 1st room where the animation takes place, so far theres not a lot going on but ive still got to add a lot more props and texture the whole thing. The look im going for is and industrial lab thats been neglected for some time. Most of the geometry so far is very low res as theres going to be a lot of props i don't want to clog up the memory. Some parts like the ceiling im keeping low res as there far from the camera and wont be in focus most of the time so theres no need for the extra resolution. Most of the textures will be made in mudbox including the bump maps and maybe some displacement maps, then touched up in Photoshop.
Tuesday 20 July 2010
What am i - WIP - 22
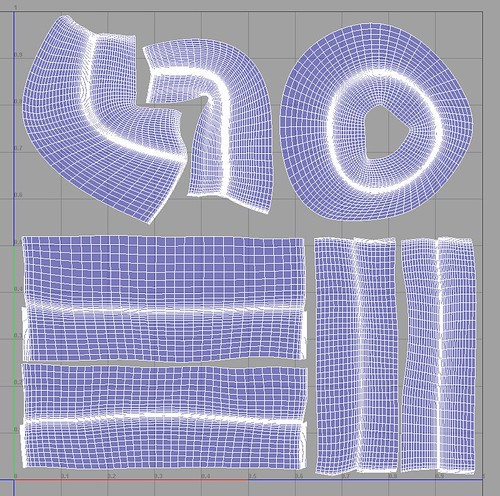
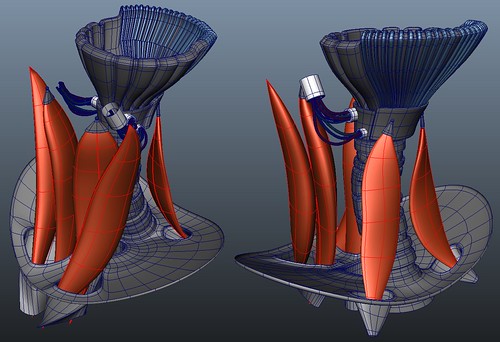
Do my UV's look big in this? ive started to set the uv's for the robot, grouping similar objects into one uv tile. This shot shows the glass objects on the left arm, as they will all be using the same shading network ive decided to just use one texture for them all, this way i can save on uv's space :). then its off to mudbox and photoshop to texture.
Monday 19 July 2010
What am i - WIP - 21
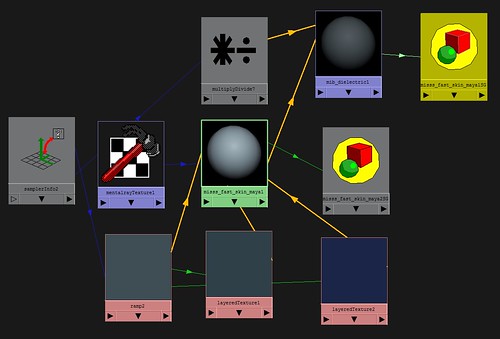
Like the old nursery rhyme, the facing ration is connected to the... V co-ord, the ramp is connected to the... SSS. Ive started testing some shader networks to get a good SSS skin, as parts of the robot are transparent im using one SSS that splits off into two shader groups, this way any changes to on will affect both as i want to keep all the values the same apart from the transparency. Also ive set up a ramp texture that used the facing ratio to add some small details. Then when most of the modeling is complete i will just connect the ramp up to some textures ill export from mudbox :D
What am i - WIP - 20
Usually i would make the head and stop at the neck as it is hidden by the characters clothes but because most of the skin has some transparency i need to extend the mechanical look underneath. Here ive started to make the interior where the spine and neck muscles join the body.
Sunday 18 July 2010
What am i - WIP - 19
I've started on making a few props that will fill the lab where the animation takes place. still needs more work on the texturing but most of the props are low-res as they will only be in the background.
What am i - WIP - 18
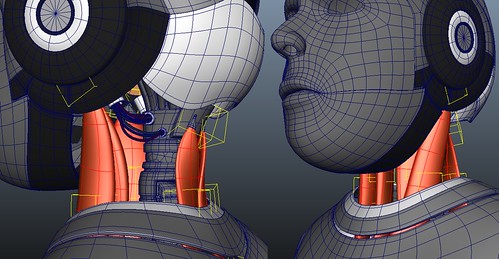
Adding more muscles to the neck using medical references to try and get a good representation. I decided only to do a few so that the neck spine and interior of the skull can still be seen. These muscles are made to show up when rendering, most maya muscles are only used for rigging purposes and are never rendered but because of the style of this character most of the muscles used in the rig will also be textured and set up to render.
What am i - WIP - 17

Ive started to add the muscles for the hip joints before rigging as the position of these muscles will affect the way i model around them. i mirrored the joints across and made a simple mirror rig to help me position each muscle the same. Im also recording parts of the project as i go along so ill be posting some videos up soon :)
What am i - WIP - 16
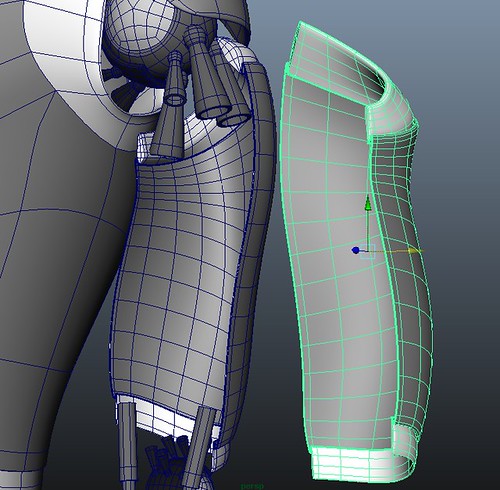
Ive added some more detail to the arms so that they can be separated, inside there will be some bones and muscles. also when he finds his arm it wont be in one holes piece so he as to rebuild it bit by big :)
What am i - WIP - 15
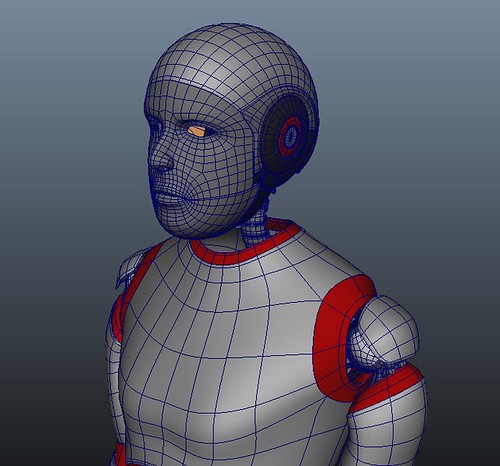
Ive now added the new head to the body, there are still some pasts to add but the main parts are muscles that connect from the head neck and body :)
What am i - WIP - 14
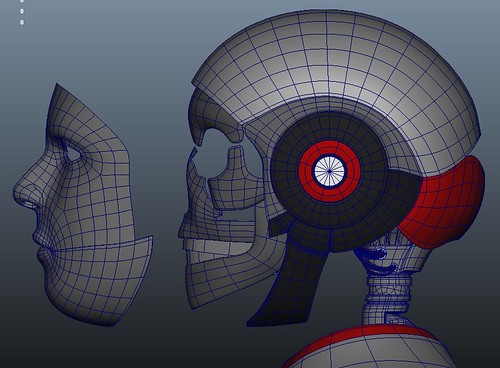
For some parts of the animation he has no jaw so it has to look good on the inside as well :D
What am i - WIP - 13
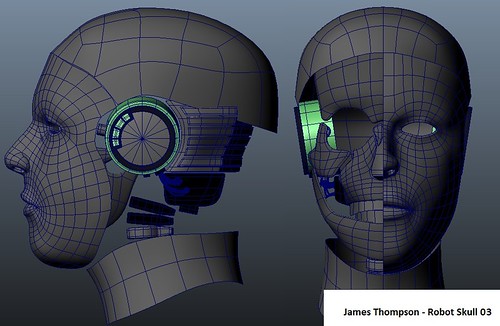
When remaking the head i decided to make the spine look a bit cooler and more mechanical. there are 2 ball joints so when rigging the head will rotate on these.
What am i - WIP - 12

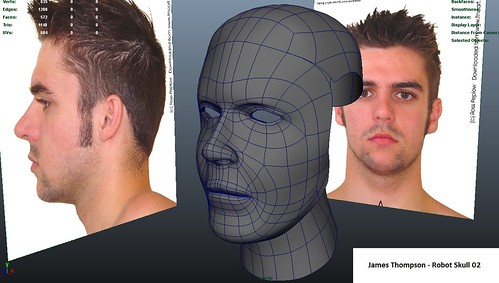
i decided to re-make the head, well not all of it but just that parts im not happy with.
What am i - WIP - 11
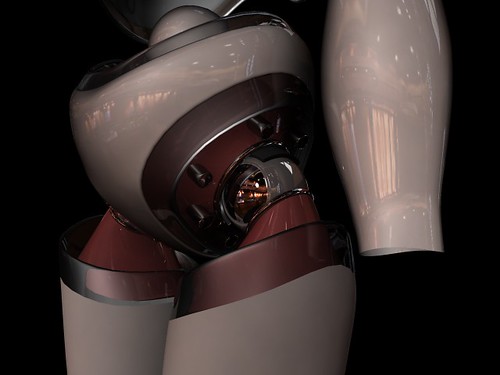
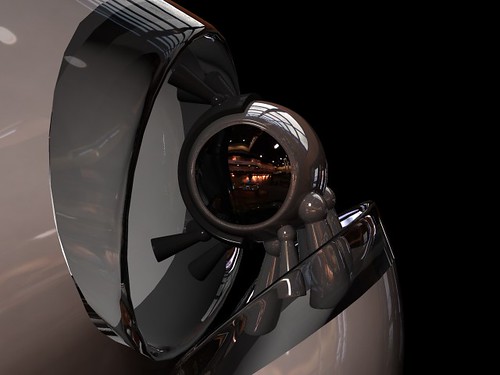
A test render of the hip joints. At the moment it all looks a bit similar and shiny but this is only using 4 shaders, Im leaving all the texturing and shader networks towards the end as i may change some polygons and that would effect the uv's, so uv's ill be done last :D
What am i - WIP - 10
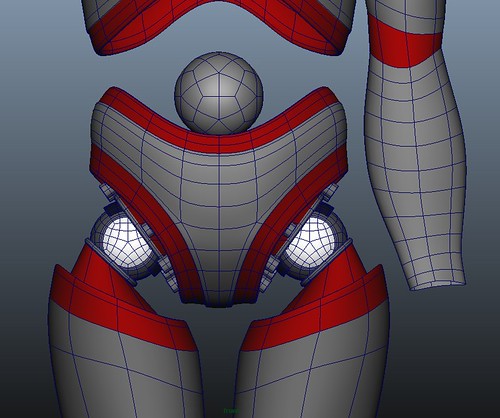
When making the hips i found that different shapes make the robot look more feminine, like in nature where girls have bigger hips so when making the female robot i will use a similar hip setup but modify the shape.
What am i - WIP - 09
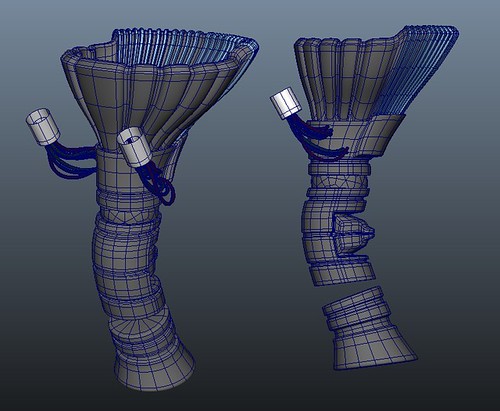
Starting on the hip was fun as i can slowly see all the parts coming together. the hips will rotate on the ball joint but also have muscles connecting for the hips to the leg. This way the ball is just a joint and the muscles make the rotation.
What am i - WIP - 08

another test render to visualize what the final will look like and also to see if any areas need improvement.
What am i - WIP - 07
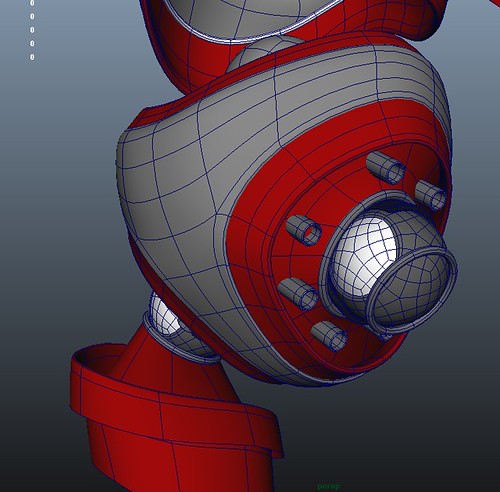
After some research i re-made the shoulder joint more realistic to what other robots use, this will help when it comes to rigging as all the parts will be rigged to work together. The connectors will be connected to the muscles that join the rig together. I have also used the round corners node so that objects bevel together, this saves on modeling the complex bevels between 2 objects.
What am i - WIP - 06
I decided to take a test render using some custom shader networks ive made. it uses the facing ratio of the camera to drive the v of a ramp texture, so basically parts towards the edge that are facing away from the camera get shaded more black.
What am i - WIP - 05
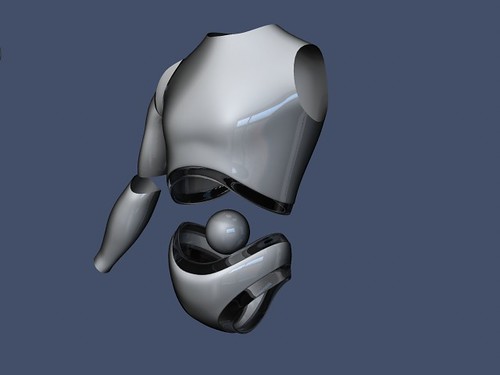
Ive separated the different parts of the body and started to make a glass edge where two parts join together
What am i - WIP - 04
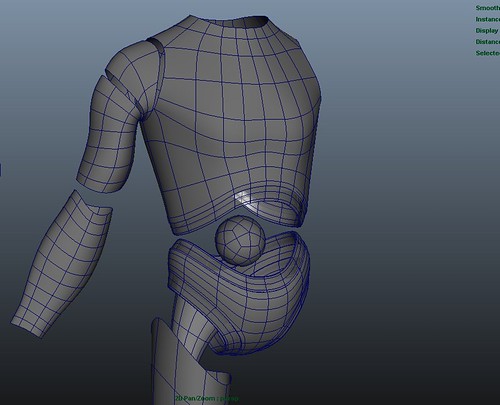
Part of the story is the robot has a power unit like a heart, but this just make it look like iron man so i think ill re-make this part :D
What am i - WIP - 03
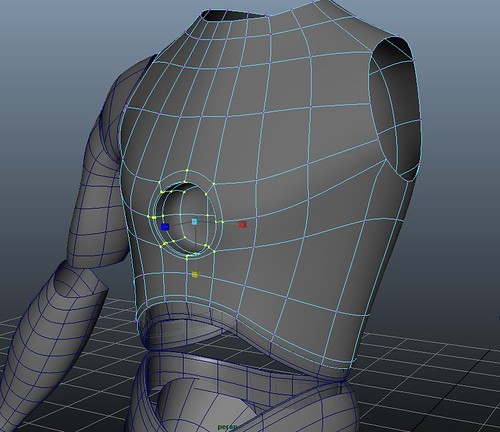
Adding more resolution to the face plate and adding a few more interior elements. The face plate will be slightly transparent do that you can see the underlying structure, also there will be muscles added what will be rigged along with the face and bones so that all work together :D
Subscribe to:
Posts (Atom)