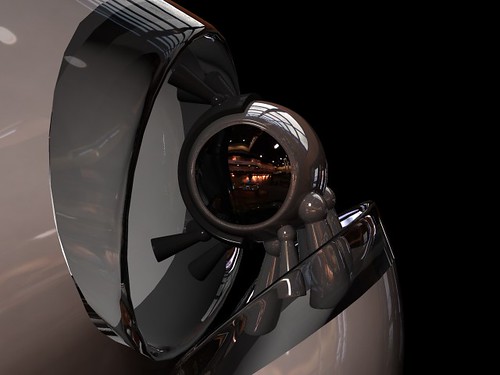
After some research i re-made the shoulder joint more realistic to what other robots use, this will help when it comes to rigging as all the parts will be rigged to work together. The connectors will be connected to the muscles that join the rig together. I have also used the round corners node so that objects bevel together, this saves on modeling the complex bevels between 2 objects.
No comments:
Post a Comment